Évaluation objective de la symétrie des membres à l'aide de capteurs IMU : une méthode basée sur des capteurs pour détecter les asymétries de force de réaction au sol chez plus de 1 000 chiens
 Partager
Partager Twitter
Twitter Pinterest
Pinterest LinkedIn
LinkedIn
Découverte
- L’évaluation visuelle de la démarche varie selon les observateurs.
- Les capteurs IMU permettent d'obtenir des mesures de symétrie au trot, objectives et faciles à utiliser en clinique.
- Le système capture plusieurs paramètres de marche. Nous calculons les percentiles de symétrie de grade 0 en fonction des paramètres.
- Pendant que les chiffres illustrent le pic GRF par Kg, le même calcul de symétrie s'applique aux autres paramètres de l'application (longueur de foulée, durée, hauteur, pourcentage stationnaire, etc.).
Objectifs
- Établir une population de référence pour la symétrie des membres au trot en utilisant les capteurs Tendiboots.
- Présenter des illustrations cliniques tirées de l'application pour montrer comment l'ouvrage de référence est utilisé en pratique.
Matériel et méthodes
Conception : Cohorte prospective multicentrique en situation réelle, enregistrée par des vétérinaires et des professionnels de la réadaptation lors des soins de routine.
Instrumentation et traitement : Tendiboots™ Canine (photo 1), IMU légères fixées aux membres ; enregistrement du trot en ligne droite de 10 secondes en laisse via l’application mobile, répété si nécessaire, traitement automatique. L’application affiche les valeurs de chaque paramètre sur un fond vert normal issu de la cohorte de grade 0 (actuellement moyenne ± écart-type), et signale en rouge les valeurs supérieures à ce fond.
Critère d'évaluation principal : Différence absolue en pourcentage |perc_diff| entre les membres droits et gauches, normalisée par leur moyenne, calculée comme suit : perc_diff = (R − L) × 100 / ((R + L) / 2), rapporté sous forme de valeurs absolues pour chaque paramètre.
Cohorte : Grade 0, 763 chiens manipulés par 94 utilisateurs avec 3717 enregistrements FL et 3730 HL.
Objet : Cette affiche présente les données de référence du niveau 0. L’ensemble des données multi-niveaux comprend plus de 1 000 chiens.
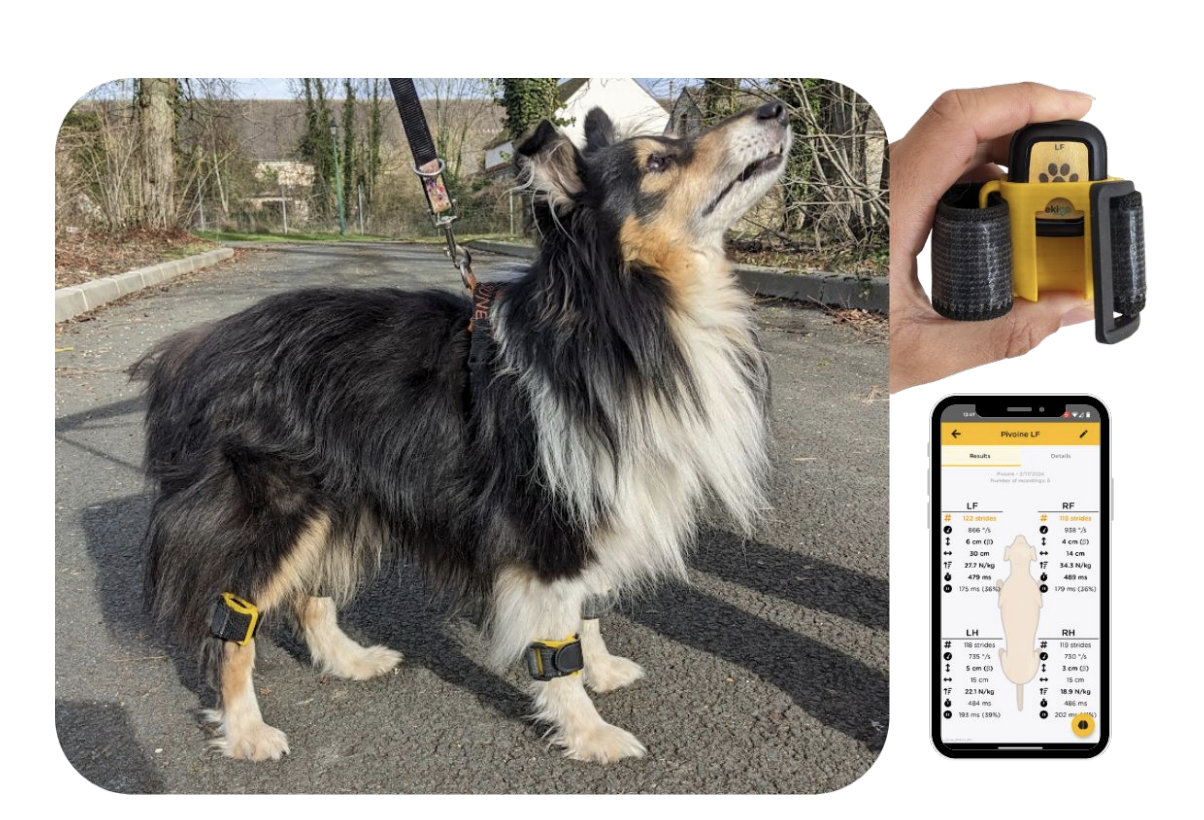
Photo 1 : Capture d’écran de l’application mobile et vue d'ensemble de l'appareil monté
Résultats
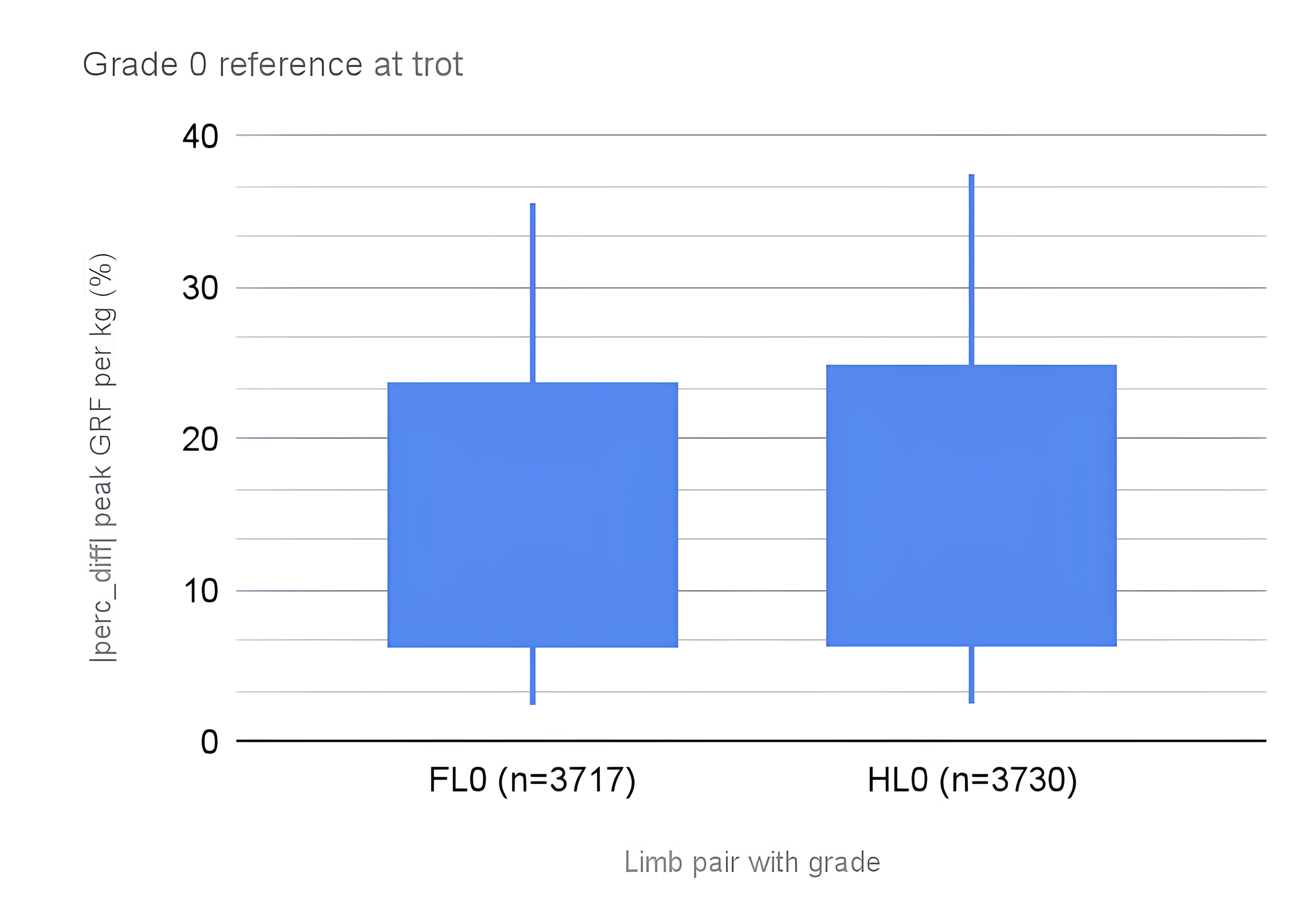
Ancrage de grade 0, membres antérieurs au trot : médiane ≈ 13 %, P90 ≈ 36 %, P95 ≈ 44 %. À utiliser comme plage normale pour l'interprétation, et non comme seuil diagnostique (graph 1).
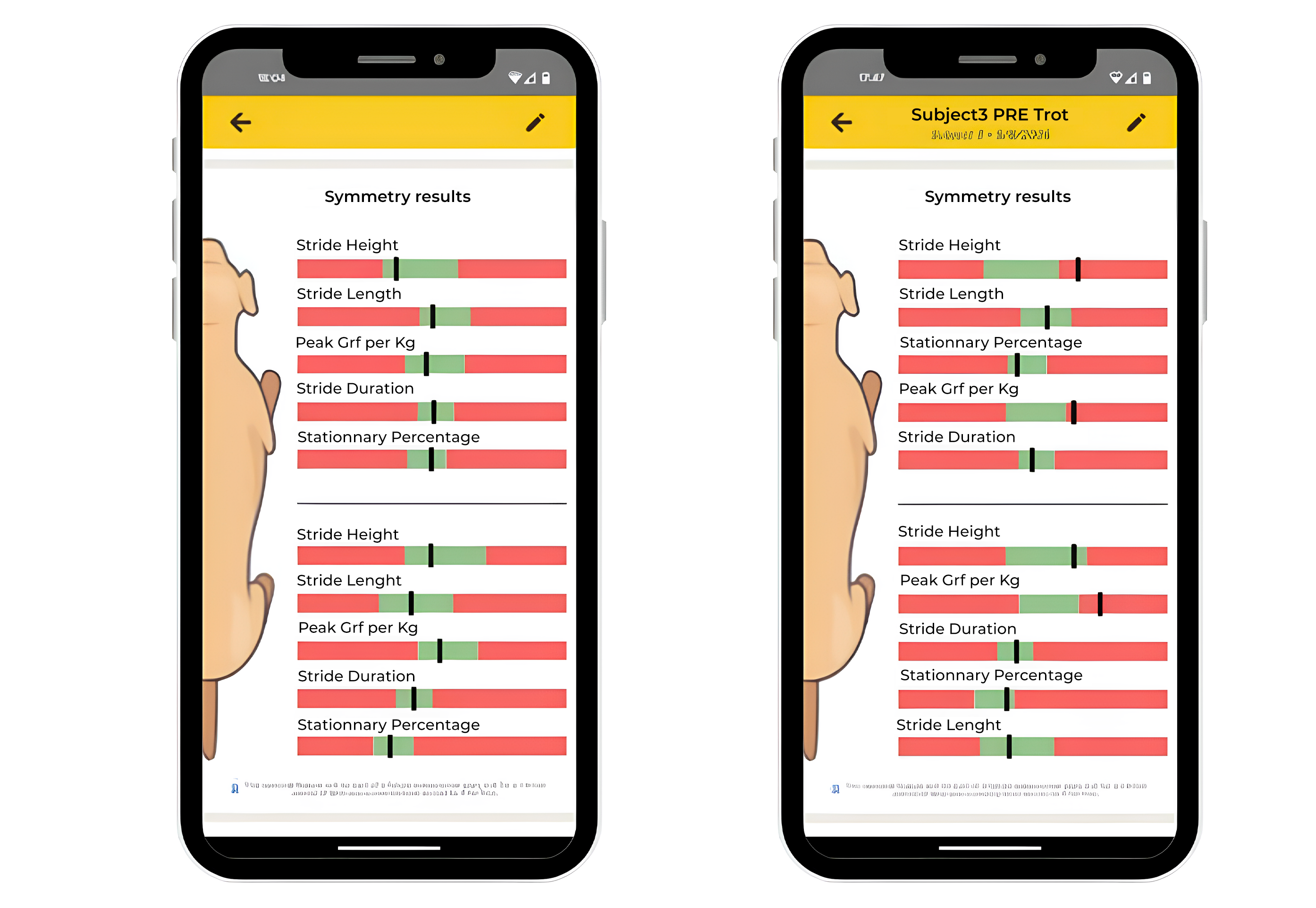
Cartographie dans l'application, vert = plage normale de grade 0 (moyenne actuelle ± écart-type), rouge = au-dessus de la normale (image 1).
En pratique clinique, les cas bénins peuvent se situer autour de la médiane, les valeurs hors plage mettent en évidence une asymétrie accrue.
Appliquer la référence pour le triage et le suivi intra-chien
|
Graph 1 : Référence de niveau 0 pour les membres |
Image 1 : Exemples intégrés à l'application. |
Conclusion
- Connaître la norme, rapidement. Une référence basée sur les percentiles transforme les signaux IMU en une plage normale prête à l'emploi en clinique au trot, utilisable en quelques secondes.
- Agissez, ne devinez pas. Des valeurs supérieures à la normale soulignent une asymétrie accrue pour le triage et le suivi intra-chien au fil du temps.
- Crédibilité concrète. Conçu pour des races, des sites et des conditions hétérogènes, avec un contrôle qualité qui se renforce à mesure que le réseau se développe.
- Prochaine étape : les sous-ensembles standardisés étendront la référence aux niveaux scolaires supérieurs et aux modèles à paramètres multiples au sein du même flux de travail d’application.
.png)
Laissez un commentaire
Login to post comments